
An Evolutionary Framework for Matching Geospatial Object Configurations
M.S. Thesis, Dept. Elect. Comp. Eng., Univ. Missouri, Columbia, MO, USA, 2012
Abstract
This thesis presents a framework for modeling and comparing the spatial configuration of sets containing two-dimensional geospatial objects. This situation can arise in the conflation of a hand or machine drafted map to a satellite image, or in the correspondence problem of matching two images taken under different viewing conditions. We focus here on the specific problem of matching a sketched map containing several 2D objects to actual satellite imagery. Spatial relationships between objects are captured by the histograms of forces and used to construct an attributed relational graph representation of the scene. Scene matching is performed with an evolutionary algorithm, combined with a local-search heuristic. Four problem-specific mutation operators are developed and tested experimentally.
Media
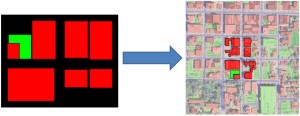
An overview of the evolutionary algorithm as it searches for a specific spatial configuration.
A close-up of the algorithm as it finds a match.